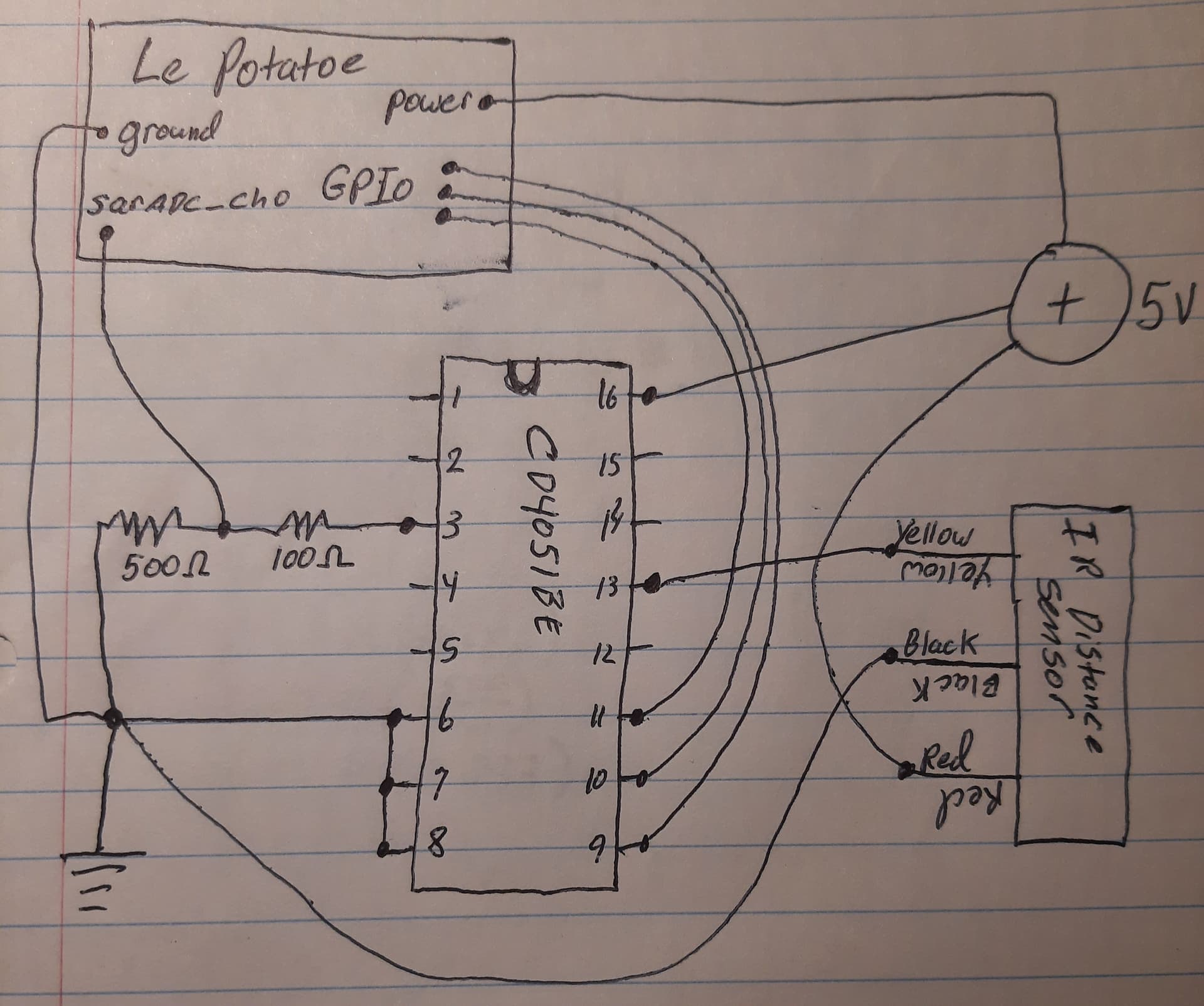
From AliExpress, I’ve purchased a few of the below IR distance sensors.
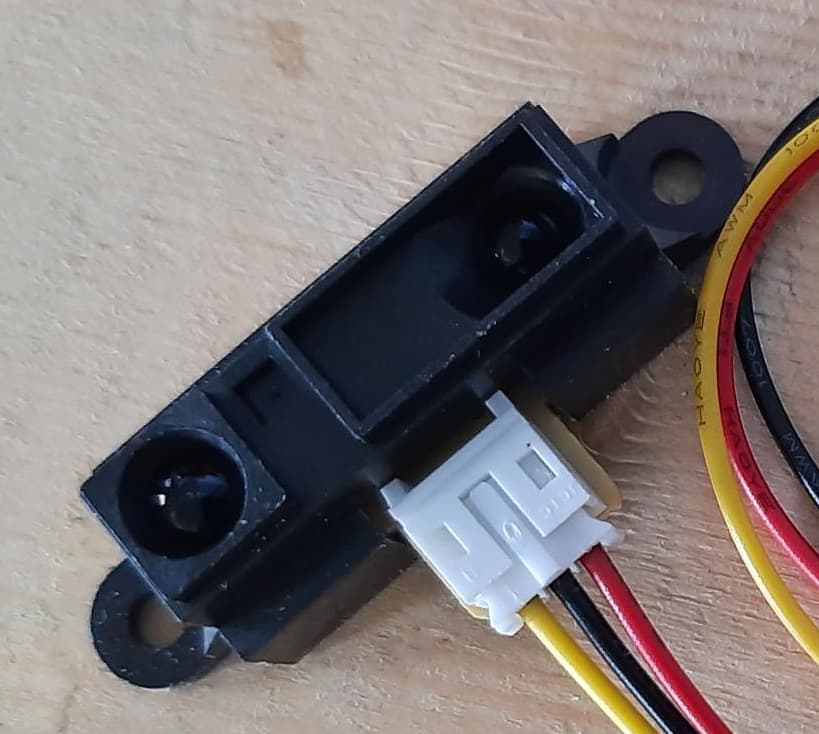

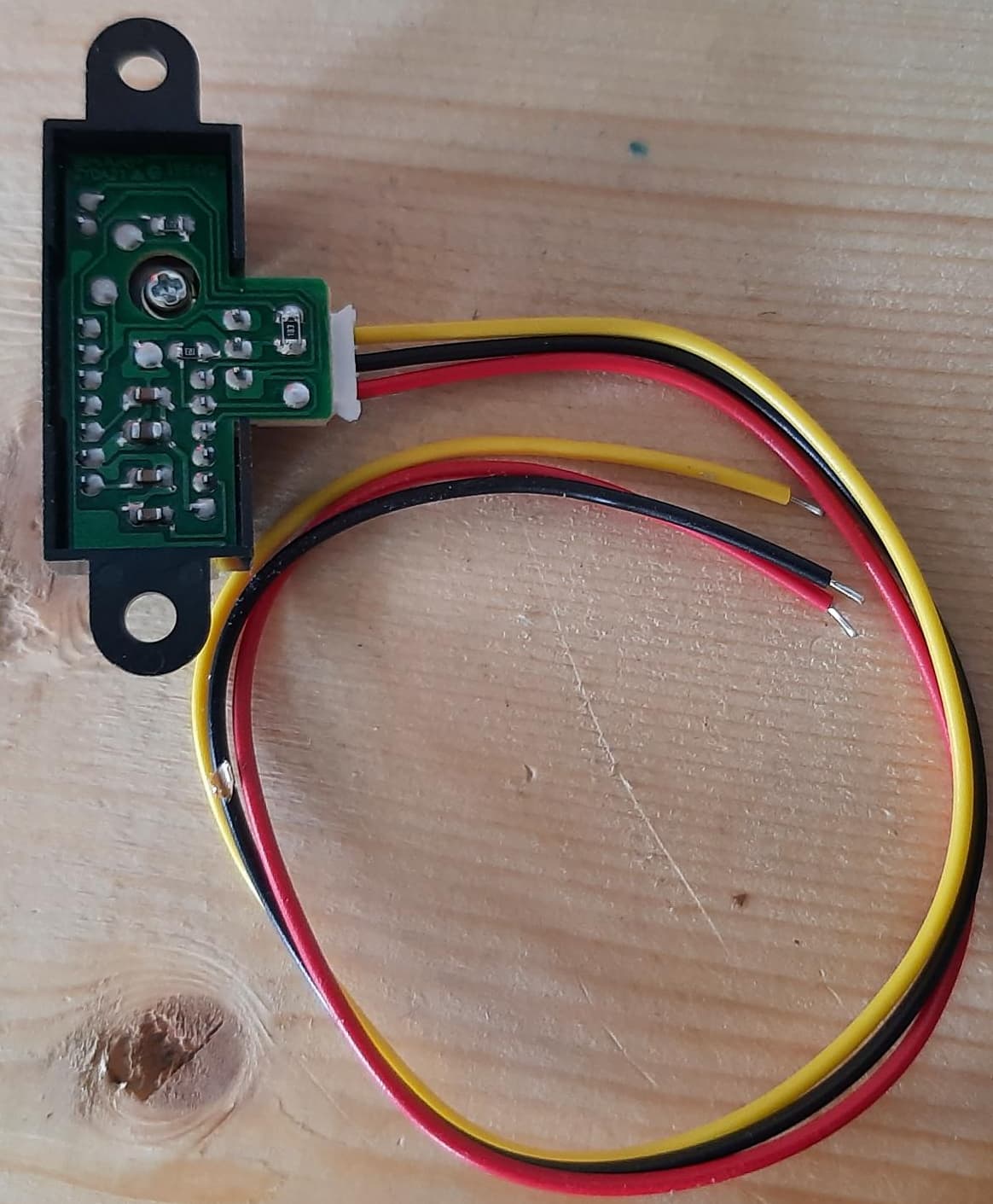
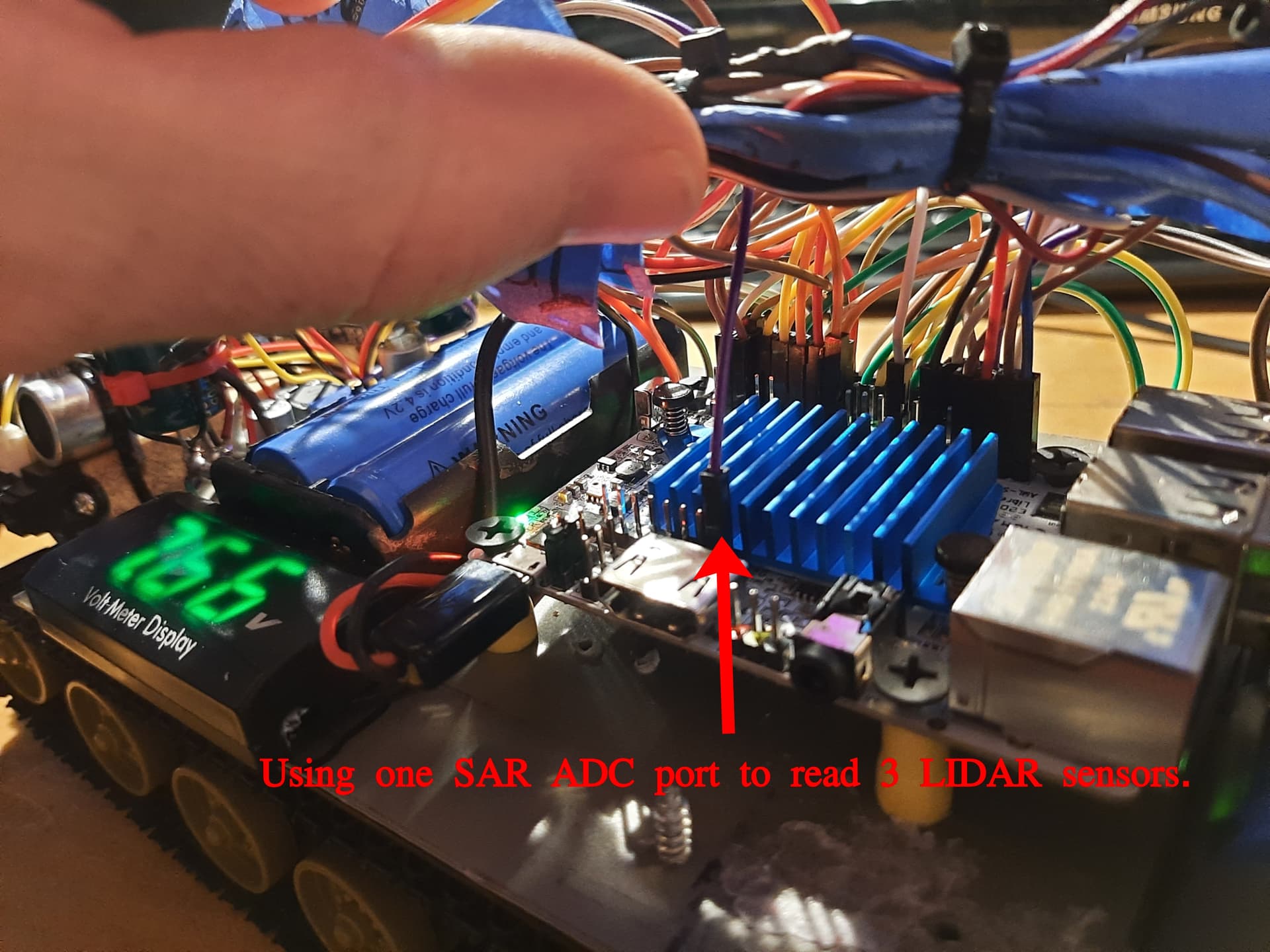
I intend to read the measurements from this device via the AML-S905X-CC.
I understand these distance sensors output a DC voltage that represents distance. I’m not sure what my exact model will output, but based on this tutorial I found, the ranges are 0.4v to 3.2v or something like that.
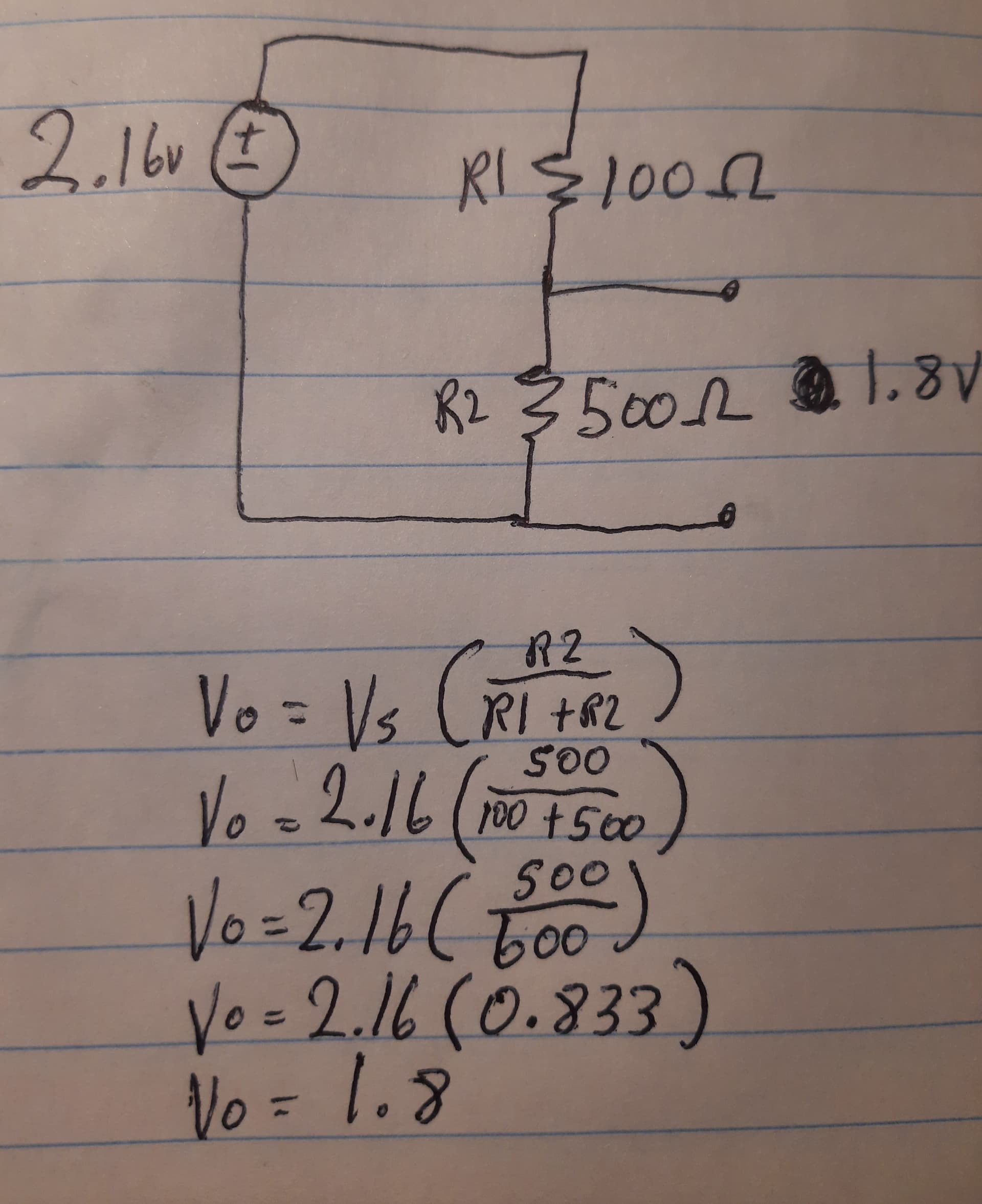
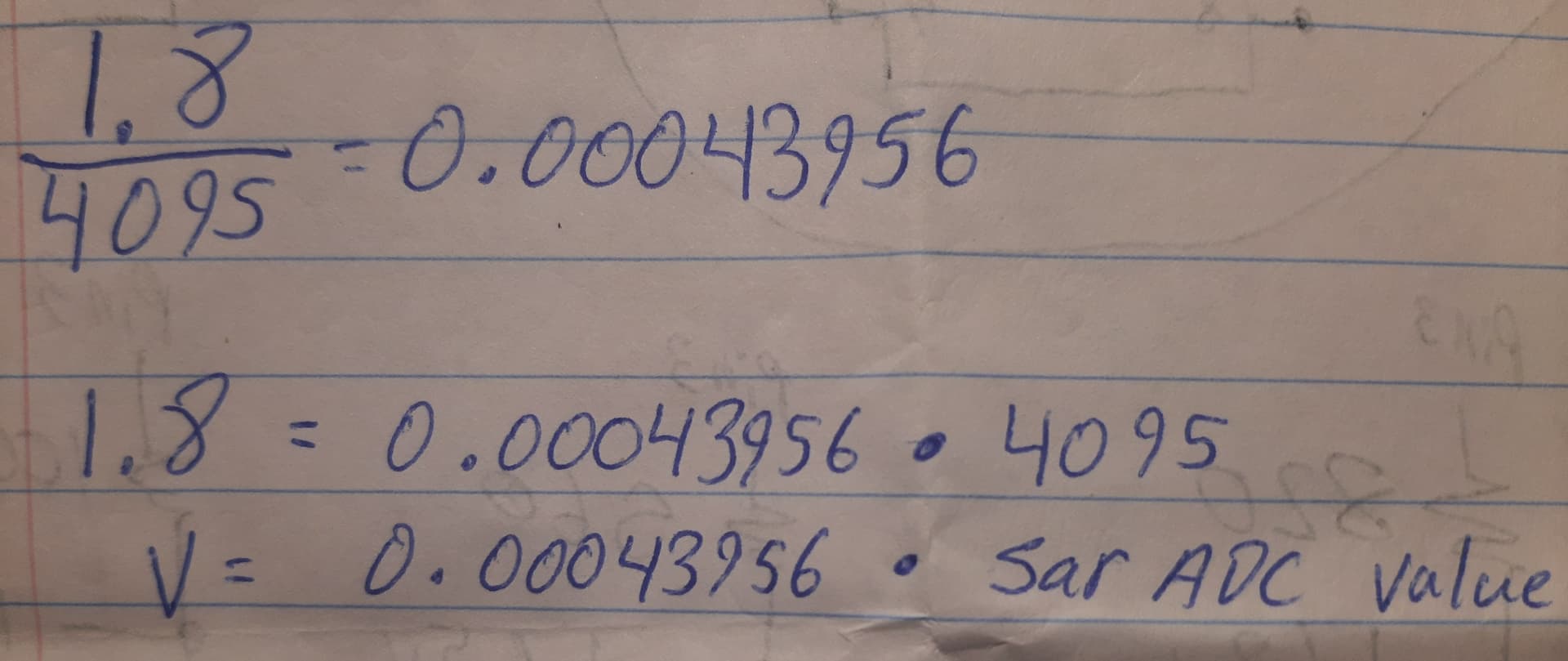
Also, based on documentation here concerning the AML-S905X-CC, it is able to safely measure voltages up to 1.8v, and it is critical to not exceed 1.8v.
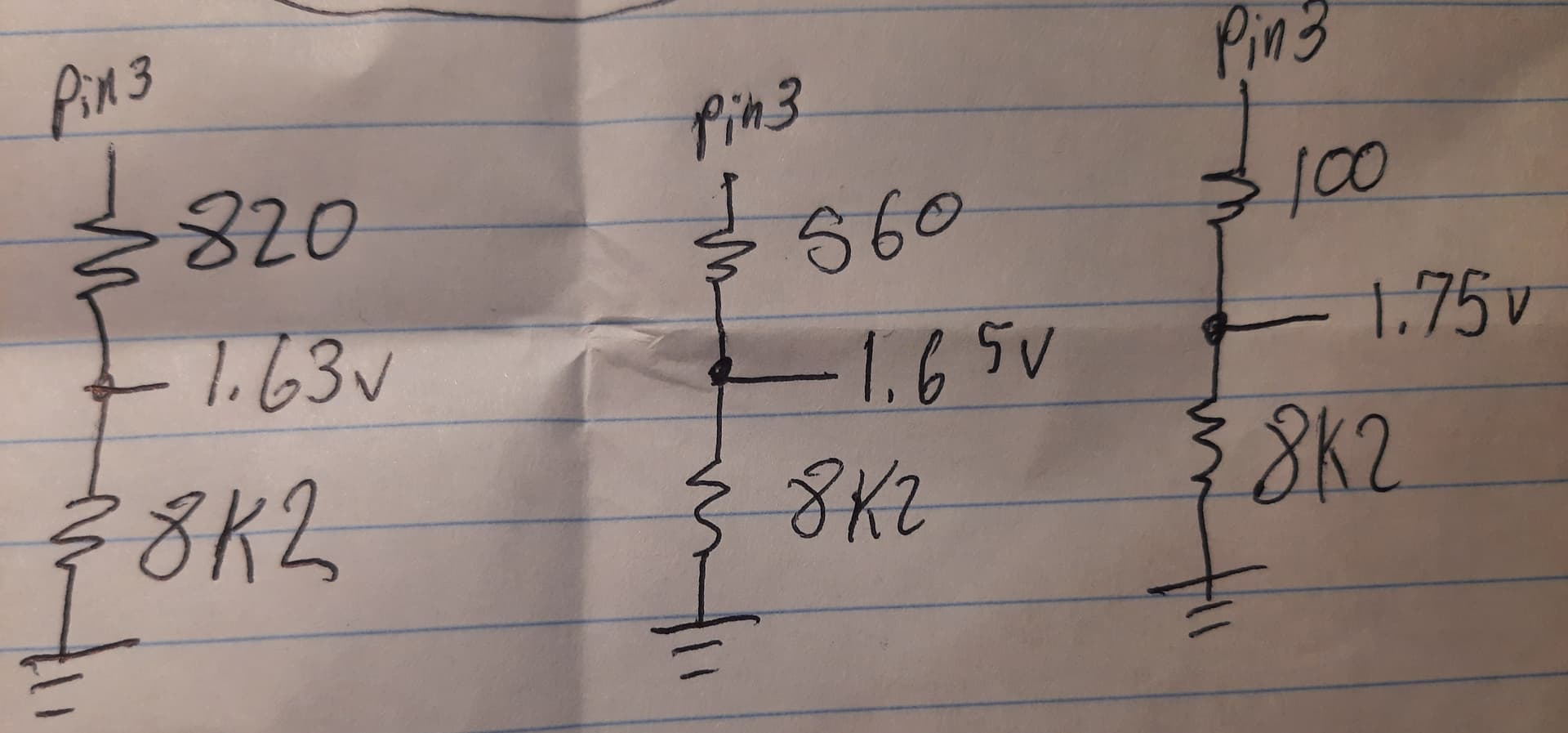
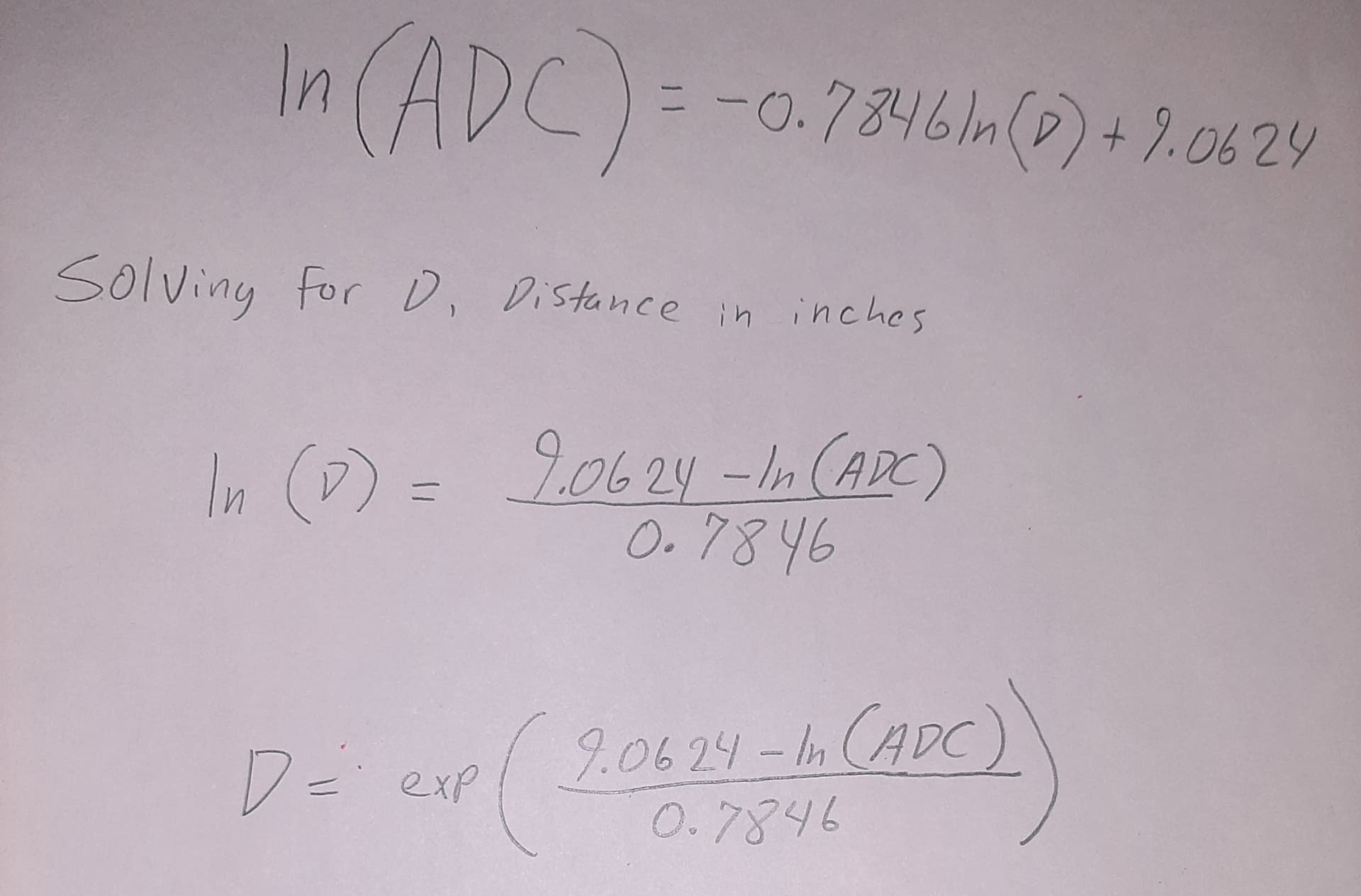
This means I’ll need a voltage divider circuit to bring the maximum voltage that my device outputs down to 1.8v exactly. This also means that I’ll need to map the new voltages that are output to distances via a customized mathematical formula. Which means I’ll need to build a testing setup to adjust distances and take several measurements, to produce an accurate formula.
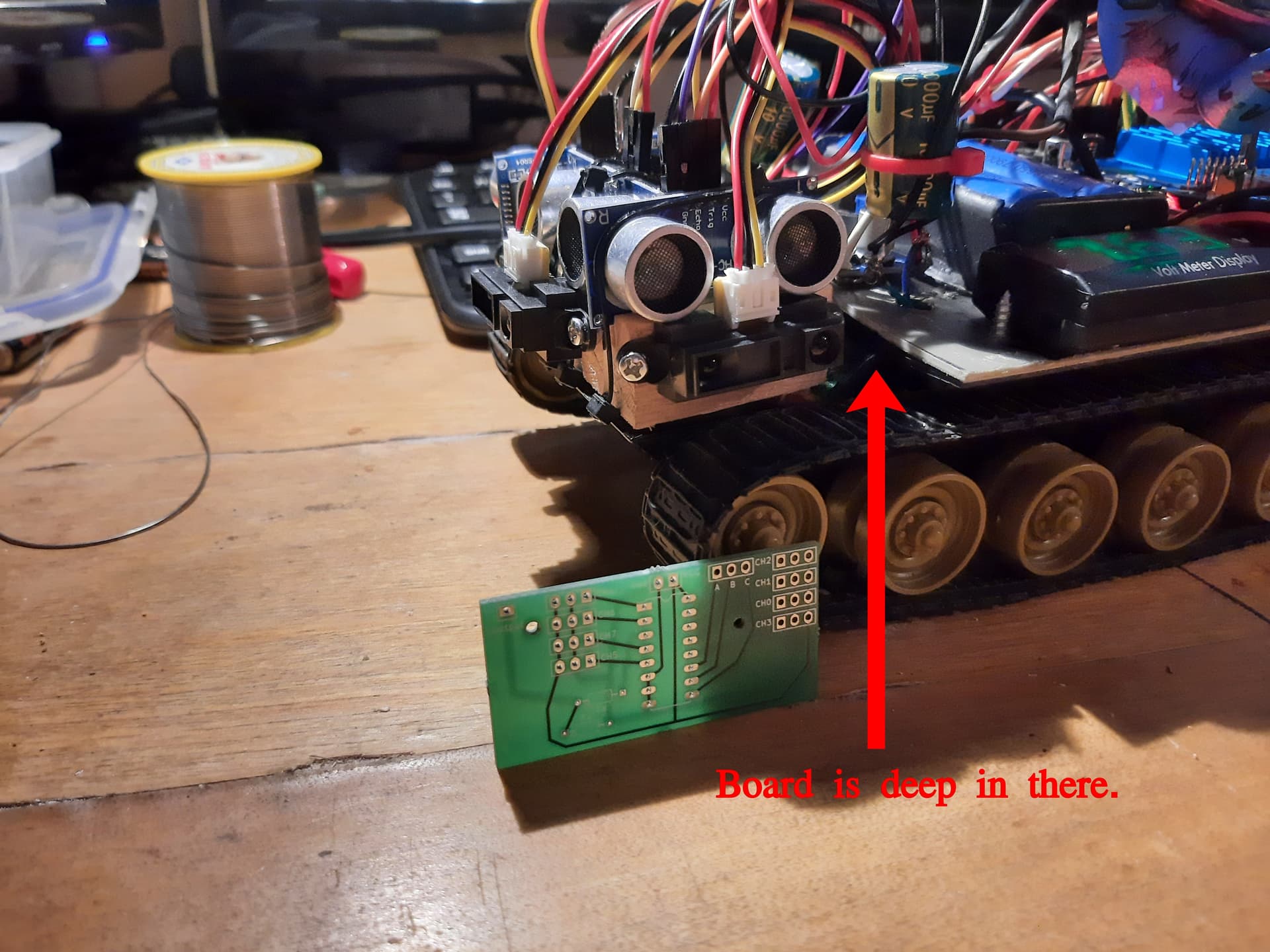
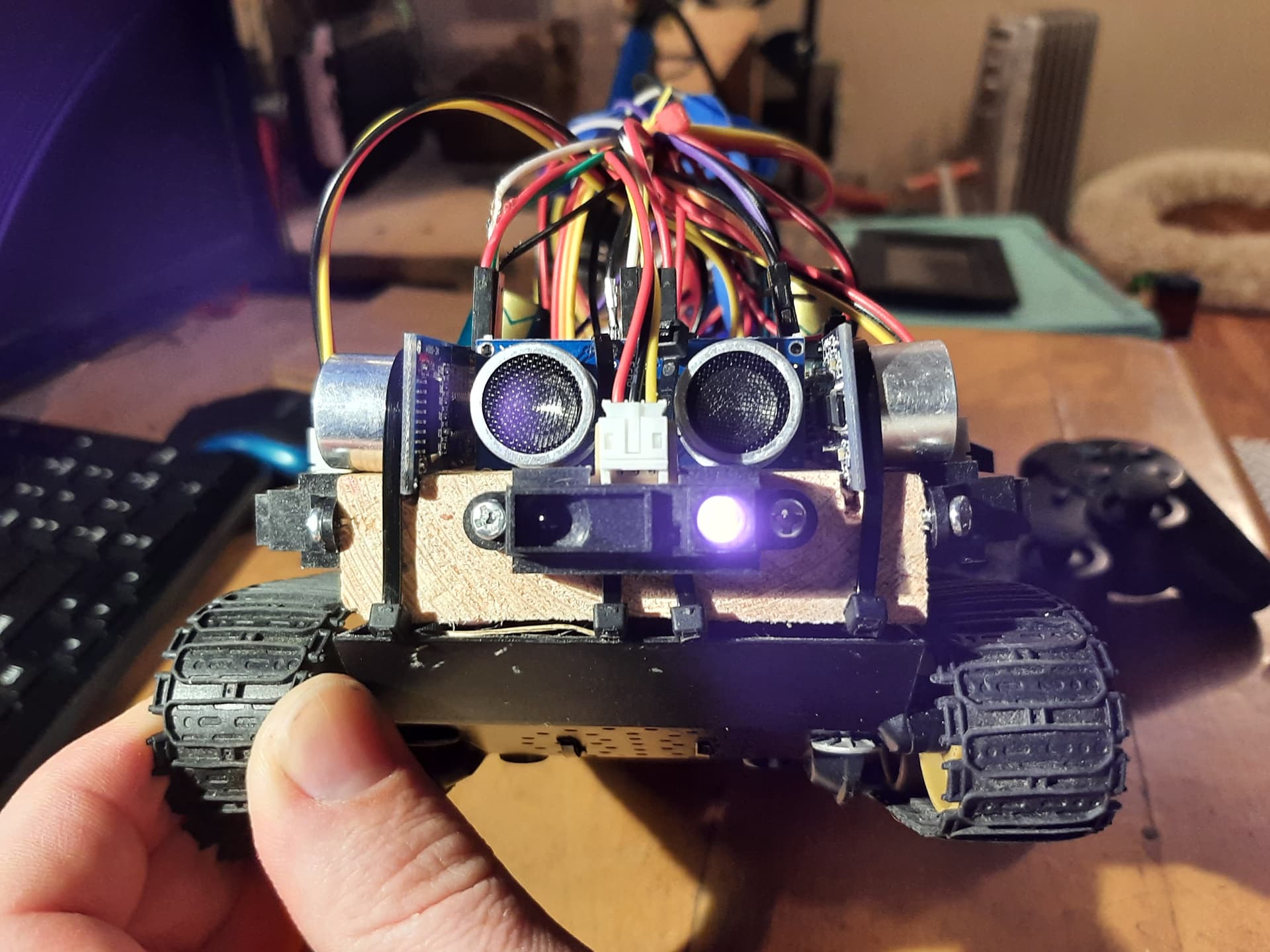
All this is in pursuit of improving my tank bot, to have multiple types of sensors that can be utilized.